הבדלים בין גרסאות בדף "מדר קיץ תשעב/סיכומים/תקציר"
מתוך Math-Wiki
מ (←משפטים חשובים) |
(←שיטות לפתרון מד״ר) |
||
| שורה 15: | שורה 15: | ||
* '''משוואת ריקרטי:''' מד״ר מהצורה <math>y'+f(x)y^2+g(x)y+h(x)=0</math>. הפתרון הכללי הוא מהצורה <math>y=\frac{ca(x)+b(x)}{cA(x)+B(x)}</math>. אם <math>y(x)=y_p(x)</math> פתרון אזי <math>y(x)=y_p(x)+\left(\mathrm e^{\sim\!\!\!\!\int(2f(x)y_p(x)+g(x))\mathrm dx}\int\mathrm e^{-\sim\!\!\!\!\int(2f(x)y_p(x)+g(x))\mathrm dx}\mathrm dx\right)^{-1}</math> הפתרון הכללי. | * '''משוואת ריקרטי:''' מד״ר מהצורה <math>y'+f(x)y^2+g(x)y+h(x)=0</math>. הפתרון הכללי הוא מהצורה <math>y=\frac{ca(x)+b(x)}{cA(x)+B(x)}</math>. אם <math>y(x)=y_p(x)</math> פתרון אזי <math>y(x)=y_p(x)+\left(\mathrm e^{\sim\!\!\!\!\int(2f(x)y_p(x)+g(x))\mathrm dx}\int\mathrm e^{-\sim\!\!\!\!\int(2f(x)y_p(x)+g(x))\mathrm dx}\mathrm dx\right)^{-1}</math> הפתרון הכללי. | ||
* נתונה מד״ר <math>\sum_{k=0}^{n-1}p_k(x,y)(y')^k+(y')^n=0</math> ממעלה <math>n</math>. אזי קיימות פונקציות <math>f_k</math> שעבורן <math>\prod_{k=1}^n\Big(y'-f_k(x,y)\Big)=0</math>. | * נתונה מד״ר <math>\sum_{k=0}^{n-1}p_k(x,y)(y')^k+(y')^n=0</math> ממעלה <math>n</math>. אזי קיימות פונקציות <math>f_k</math> שעבורן <math>\prod_{k=1}^n\Big(y'-f_k(x,y)\Big)=0</math>. | ||
| − | * אם <math>F(y,y')=0</math> נציב <math>z=y'</math> ואז <math>x=\frac yz+\sim\!\!\!\!\!\!\!\int\frac y{z^2}\mathrm dz+ | + | * אם <math>F(y,y')=0</math> נציב <math>z=y'</math> ואז <math>x=\frac yz+\sim\!\!\!\!\!\!\!\int\frac y{z^2}\mathrm dz+c</math>. בנוסף, אם <math>y=\varphi(t)</math> ו־<math>z=\psi(t)</math> אזי <math>x=\int\frac{\varphi_t'(t)}{\psi(t)}\mathrm dt</math>. |
| − | * אם <math>F(x,y')=0</math> נציב <math>z=y'</math> ואז <math>y=zx-\sim\!\!\!\!\!\!\!\int x\mathrm dz+ | + | * אם <math>F(x,y')=0</math> נציב <math>z=y'</math> ואז <math>y=zx-\sim\!\!\!\!\!\!\!\int x\mathrm dz+c</math>. בנוסף, אם <math>x=\varphi(t)</math> ו־<math>z=\psi(t)</math> אזי <math>y=\int\varphi_t'(t)\psi(t)\mathrm dt</math>. |
* '''שיטת פיקארד:''' נתונה בעיית ההתחלה <math>\begin{cases}y'=f(x,y)\\y(x_0)=y_0\end{cases}</math>. נבחר פונקציה <math>\varphi_0</math> שעבורה <math>\varphi_0(x)\equiv y_0</math>, וניצור ממנה את סדרת הפונקציות המקיימת <math>\varphi_n(x)=y_0+\int\limits_{x_0}^x f(t,\varphi_{n-1}(t))\mathrm dt</math>. במידה והסדרה הנ״ל מוגדרת היטב (כלומר, כל האינטגרלים קיימים) <math>\varphi=\lim_{n\to\infty}\varphi_n</math> היא פתרון של הבעיה. | * '''שיטת פיקארד:''' נתונה בעיית ההתחלה <math>\begin{cases}y'=f(x,y)\\y(x_0)=y_0\end{cases}</math>. נבחר פונקציה <math>\varphi_0</math> שעבורה <math>\varphi_0(x)\equiv y_0</math>, וניצור ממנה את סדרת הפונקציות המקיימת <math>\varphi_n(x)=y_0+\int\limits_{x_0}^x f(t,\varphi_{n-1}(t))\mathrm dt</math>. במידה והסדרה הנ״ל מוגדרת היטב (כלומר, כל האינטגרלים קיימים) <math>\varphi=\lim_{n\to\infty}\varphi_n</math> היא פתרון של הבעיה. | ||
* '''משוואת קלרו:''' נתונה המד״ר <math>y=xy'+\psi(y')</math>. אזי <math>y=cx+\psi(c),\quad c\in\mathbb R</math> או (כאשר <math>p:=y'</math>) <math>\begin{cases}x=-\psi_p'(p)\\y=-p\psi_p'(p)+\psi(p)\end{cases}</math>. | * '''משוואת קלרו:''' נתונה המד״ר <math>y=xy'+\psi(y')</math>. אזי <math>y=cx+\psi(c),\quad c\in\mathbb R</math> או (כאשר <math>p:=y'</math>) <math>\begin{cases}x=-\psi_p'(p)\\y=-p\psi_p'(p)+\psi(p)\end{cases}</math>. | ||
גרסה מ־11:56, 13 באוגוסט 2012
תוכן עניינים
משפטים חשובים
- משפט הקיום והיחידות למד״ר מסדר 1 בצורה נורמלית: תהי
 פוקנציה וקטורית המקיימת את תנאי ליפשיץ ב־
פוקנציה וקטורית המקיימת את תנאי ליפשיץ ב־ בתיבה
בתיבה ![B=[x_0-a,x_0+a]\times\prod_{k=1}^n[y_{0,k}-b_k,y_{0,k}+b_k]](/images/math/b/e/2/be2e9ad58b7a71cfdeba11cb14dc042c.png) , ונתונים תנאי ההתחלה
, ונתונים תנאי ההתחלה  . אזי למערכת יש פתרון אחד בדיוק בקטע
. אזי למערכת יש פתרון אחד בדיוק בקטע  .
. - כל מד״ר מסדר
 שקולה למערכת של מד״ר מסדר 1:
שקולה למערכת של מד״ר מסדר 1: 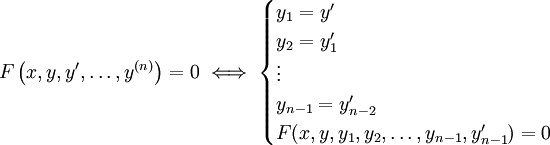 . כמו כן, המערכת נורמלית/לינארית/לינארית־הומוגנית בהתאם למד״ר המקורית.
. כמו כן, המערכת נורמלית/לינארית/לינארית־הומוגנית בהתאם למד״ר המקורית.
שיטות לפתרון מד״ר
מד״ר מסדר 1
- מד״ר בצורה דיפרנציאלית עם משתנים מופרדים היא מהצורה
 . אם
. אם  אזי
אזי  פתרון, ואם
פתרון, ואם  אזי
אזי  פתרון. אחרת
פתרון. אחרת  .
. - נתונה מד״ר
 . אז נציב
. אז נציב  ו־
ו־ .
.
- הכללה: נתונה מד״ר
 . אם
. אם  נציב
נציב  כאשר
כאשר  . אחרת נבחר
. אחרת נבחר  ונציב .
ונציב .
- הכללה: נתונה מד״ר
- מד״ר הומוגנית: נתונה מד״ר
 . אזי נציב
. אזי נציב  ו־
ו־ .
. - מד״ר לינארית: נתונה מד״ר
 . אם היא לינארית־הומוגנית אזי
. אם היא לינארית־הומוגנית אזי  , ובכל מקרה
, ובכל מקרה  .
. - משוואת ברנולי: נתונה מד״ר
 . נציב
. נציב  , כאשר אם
, כאשר אם  אז פתרון רגולרי (כאשר הקבוע החופשי שואף ל־
אז פתרון רגולרי (כאשר הקבוע החופשי שואף ל־ ), אם
), אם  אז פתרון סינגולרי, ואם
אז פתרון סינגולרי, ואם  אז לא פתרון. הפתרונות הרגולריים:
אז לא פתרון. הפתרונות הרגולריים: ![y=\sqrt[1-n]{\mathrm e^{-(1-n)\sim\!\!\!\!\int p(x)\mathrm dx}\int(1-n)q(x)\mathrm e^{(1-n)\sim\!\!\!\!\int p(x)\mathrm dx}\mathrm dx}](/images/math/d/2/1/d21060ddd088f406161a14104fc4c1e8.png) .
. - מד״ר מהצורה
 היא מדויקת אם״ם יש
היא מדויקת אם״ם יש  כך ש־
כך ש־ שווה לאגף ימין, מה שמתרחש אם״ם
שווה לאגף ימין, מה שמתרחש אם״ם  .
.
- אם המד״ר אינה מדויקת ניתן לנסות להכפיל אותה ב־
 כך שתהפוך למדויקת. תלויה רק ב־
כך שתהפוך למדויקת. תלויה רק ב־ אם״ם
אם״ם  תלויה רק ב־, ואז
תלויה רק ב־, ואז  . היא תלויה רק ב־
. היא תלויה רק ב־ אם״ם
אם״ם  תלויה רק ב־, ואז
תלויה רק ב־, ואז  .
.
- אם המד״ר אינה מדויקת ניתן לנסות להכפיל אותה ב־
- משוואת ריקרטי: מד״ר מהצורה
 . הפתרון הכללי הוא מהצורה
. הפתרון הכללי הוא מהצורה  . אם
. אם  פתרון אזי
פתרון אזי  הפתרון הכללי.
הפתרון הכללי. - נתונה מד״ר
 ממעלה . אזי קיימות פונקציות
ממעלה . אזי קיימות פונקציות  שעבורן
שעבורן  .
. - אם
 נציב
נציב  ואז
ואז  . בנוסף, אם
. בנוסף, אם  ו־
ו־ אזי
אזי  .
. - אם
 נציב ואז
נציב ואז  . בנוסף, אם
. בנוסף, אם  ו־ אזי
ו־ אזי  .
. - שיטת פיקארד: נתונה בעיית ההתחלה
 . נבחר פונקציה
. נבחר פונקציה  שעבורה
שעבורה  , וניצור ממנה את סדרת הפונקציות המקיימת
, וניצור ממנה את סדרת הפונקציות המקיימת  . במידה והסדרה הנ״ל מוגדרת היטב (כלומר, כל האינטגרלים קיימים)
. במידה והסדרה הנ״ל מוגדרת היטב (כלומר, כל האינטגרלים קיימים)  היא פתרון של הבעיה.
היא פתרון של הבעיה. - משוואת קלרו: נתונה המד״ר
 . אזי
. אזי  או (כאשר
או (כאשר  )
)  .
. - משוואת לגראנז׳: נתונה המד״ר
 עבור
עבור  . נציב ואז
. נציב ואז  . לפיכך מקיים
. לפיכך מקיים  או
או  (מקרה זה יש לבדוק בנפרד), ו־ מקיים
(מקרה זה יש לבדוק בנפרד), ו־ מקיים  .
.
מד״ר מסדר 2
- בהנתן מד״ר
 או
או  נציב ונקבל
נציב ונקבל  או
או  , בהתאמה. מתקיים
, בהתאמה. מתקיים  ו־
ו־ .
.
מד״ר מכל סדר
מד״ר לינארית
בפרק זה המד״ר היא תמיד  , וכן
, וכן  הם פולינומים ממעלה
הם פולינומים ממעלה  או פחות.
או פחות.
- אם המד״ר לינארית־הומוגנית אז מרחב הפתרונות שלה הוא מרחב וקטורי.
- אם בנוסף המד״ר מקיימת את משפט הקיום והיחידות אזי מרחב הפתרונות מימדי.
- אם בנוסף המד״ר מקיימת את משפט הקיום והיחידות אזי מרחב הפתרונות
- ורונסקיאן: עבור קבוצת פונקציות
 מגדירים
מגדירים  .
.
- אם ת״ל אזי
 .
. - אם פתרונות של מד״ר לינארית־הומוגנית המקיימת את תנאי משפט הקיום והיחידות בתחום
 וכן
וכן  אזי הם ת״ל.
אזי הם ת״ל.
- אם
- משפט ליוביל: אם פתרונות בת״ל של המד״ר והיא הומוגנית אזי
 .
. - הפתרון הכללי של המד״ר הוא
 , כאשר
, כאשר  הפתרון הכללי של המד״ר הלינארית־הומוגנית המתאימה ו־
הפתרון הכללי של המד״ר הלינארית־הומוגנית המתאימה ו־ פתרון פרטי כלשהו של המד״ר.
פתרון פרטי כלשהו של המד״ר. - וריאציית הפרמטרים: נתונים פתרונות בת״ל של המד״ר הלינארית־הומוגנית המתאימה. אזי הפתרון הכללי של המד״ר הוא
 כאשר
כאשר 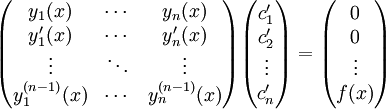 . באופן שקול:
. באופן שקול: 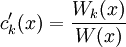 , כאשר
, כאשר  .
. - נניח שהמד״ר לינארית־הומוגנית עם מקדמים קבועים. אזי נציב
 , ולכן
, ולכן  וגם
וגם 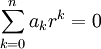 . אם השורשים השונים זה מזה הם
. אם השורשים השונים זה מזה הם  והריבויים שלהם
והריבויים שלהם  בהתאמה אזי הפתרון הכללי הוא
בהתאמה אזי הפתרון הכללי הוא 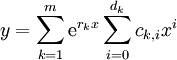 . אם
. אם  אינו ממשי ניתן לכתוב
אינו ממשי ניתן לכתוב  ואז, כיוון ש־
ואז, כיוון ש־ שורש עם אותו ריבוי, נציב
שורש עם אותו ריבוי, נציב  .
. - שיטת הניחוש/הבחירה/המקדמים הנעלמים: נניח שהמד״ר לינארית עם מקדמים קבועים וכן
 , כאשר
, כאשר  קבועה (יכולה להיות גם 0), והריבוי של ב־
קבועה (יכולה להיות גם 0), והריבוי של ב־ הוא
הוא  (במידה ו־ לא שורש נאמר
(במידה ו־ לא שורש נאמר  ). אזי קיים פתרון פרטי מהצורה
). אזי קיים פתרון פרטי מהצורה  כאשר
כאשר  . הערה: אם
. הערה: אם  נוכל לפתור עבור
נוכל לפתור עבור  בנפרד ולסכום את הפתרונות הפרטיים.
בנפרד ולסכום את הפתרונות הפרטיים.